关键词 |
广西机器人行走轨道,南川工业机器人行走轨道,大渡口工业机器人行走轨道,忠县工业机器人行走轨道 |
面向地区 |
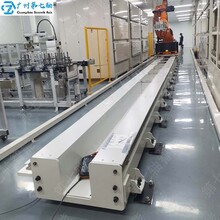
机器人行走轴又名机器人地轨、机器人第七轴或者机器人行走轴,由于安装机器人行走轨道的成本比直接安装几台机器人的成本更低,投入到生产线上可以提升生产效率,为企业带来更高的经济效益,机器人行走轨道也就慢慢地普及起来。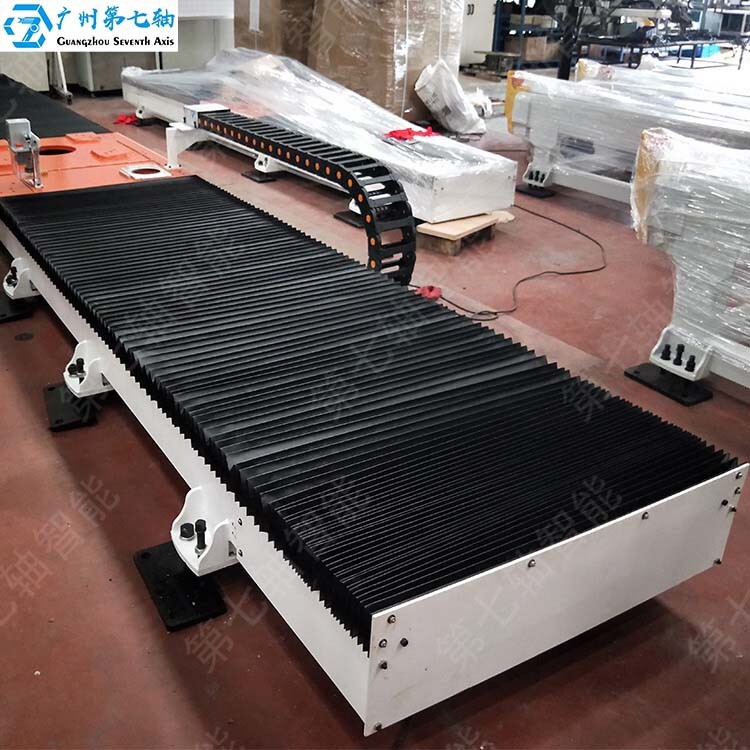
机器人行走轴具有以下优点:
1.机器人行走轴可随意与其他设备组成生产线工作,适用大小批量生产应用,对操作人员要求低,安率高,实现快速生产;
2.机器人行走轴可提高生产过程的自动化程度,提高劳动生产率,降低生产成本,加快实现工业生产自动化,工厂可更准确地控制生产的节拍,安排生产计划;
3.机器人行走轴以快、精、准的特点快速完成作业,采用PLC+触摸屏,稳定性好,操作简单,易学易用,在生产更换产品重新编程时,可在短时间内完成,省时;
4.机器人行走轴替换人工安全地完成作业,很大地改善了工人的劳动条件,同时,在一些动作简单但又重复作业的操作中,以机械手代替人手进行工作,可以避免由于操作疲劳或疏忽而造成的人身事故。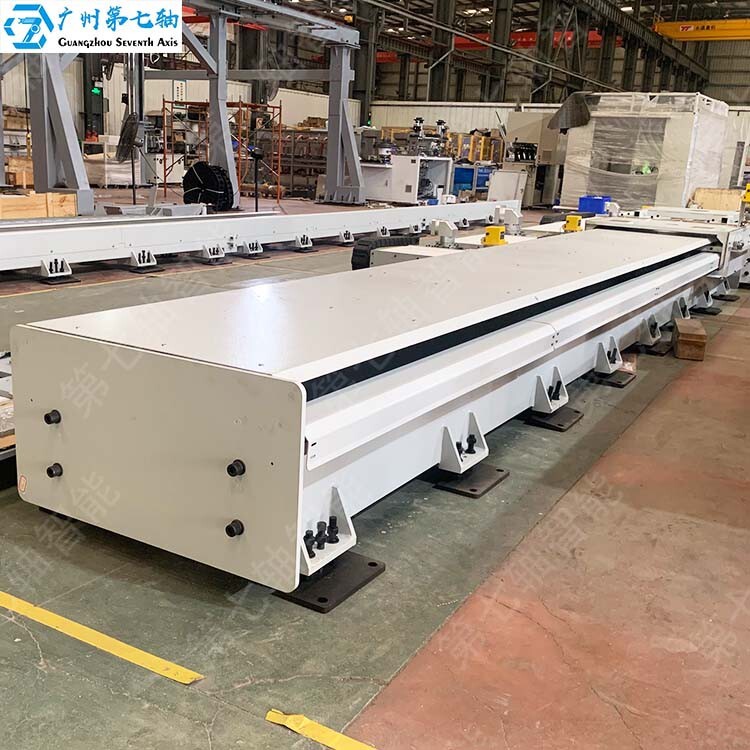
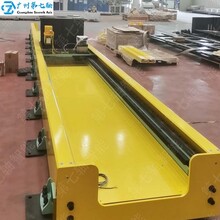
工业自动化中,工业机器人逐渐被应用于生产的各个环节,替代人工作业,促进了自动化生产的进程。而机器人行走轴作为机器人的一个行走辅助机构,也快速发展起来,在一些空间复杂、工件大的场合应用广泛。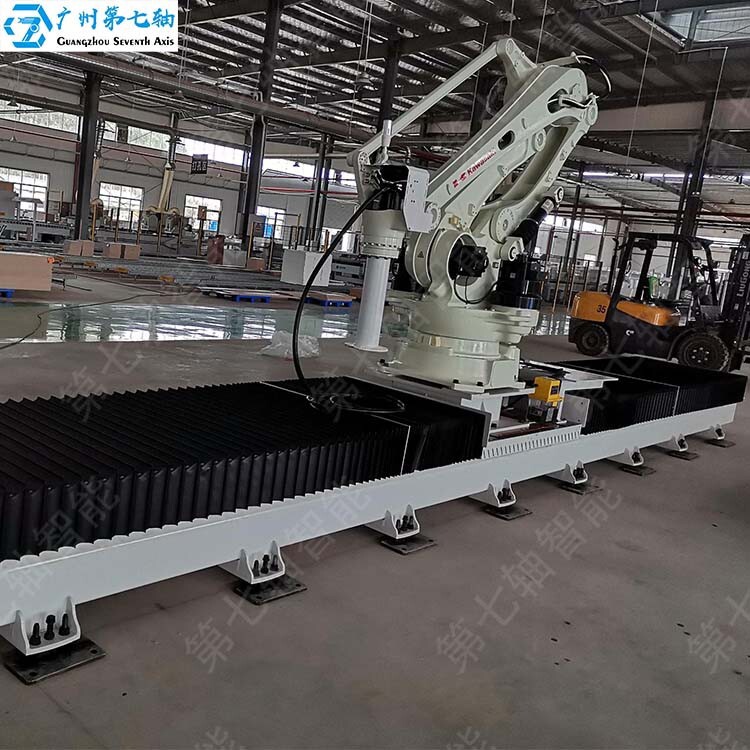
机器人行走轴的系统功能:
1、系统程序控制:地轨系统与“模架”的信号接口及系统接口全部都是采用数字信号传输,从而互相之间的稳定性及牢靠性。具备手动和自动两种运转控制方式, 手动方式下可单操作某一个工位,自动方式下按设定的运转程序自动运转。
2、软件功能作用:完成工位无序工作,即:随机发起工作信号,七轴可以依据发起的先后顺序依次完成工作;并且在信号复位后可以肃清掉一切未执行的信号。
3、急停连锁功用:随意激起任何一个急停按钮(及七轴、机器人),七轴可以立刻中止正在完成的动作,只要在该急停重新复位后设备才恢复正常运转。
4、信号安全性:在较短的时间内连续给出两次信号,机器人行走轴只执行一次信号而不会连续工作两次;在程序晋级后,有完好的系统备份。
5、信号安全性:在较短的时间内连续给出两次信号,机器人行走轴只执行一次信号而不会连续工作两次;在程序晋级后,有完好的系统备份。
6、安全保养及维护:外用钥匙维护开关,当某个模架不用时(如:某个模架呈现毛病需维修),采用外用钥匙维护开关跳过此模架,这样不会由于人为的误操作或其他的不测而造成产品的报废。
7、急停按钮:每台模架具备在紧急状况时中止整个系统的急停按钮。
8、系统接口:一切硬件接口和软件功用由提供方对接,所有客户的需求。
机器人行走轴拥有过硬的质量、适用性强(是一款可应用于多种场合的机器人行走轴单元)、结构简单、故障率低、性能可靠、易于维护、刚性高、运行速度快、有效负载大、重复精度高、防护性能好、可定制。
如何选择一款适合自己的机器人行走轴:
1.负载:负载的轻重不同决定了第七轴的型材,FMS重负载会选钢铁铸造,轻负载会选择铝型材构件;
2.行程:了解总行程、有效行程;
3.机器人的型号:决定承载滑座的大小;
4.安装环境要求:开放式还是封闭式;
5.速度;
6.安装形式:吊挂式还是地轨式;
7.楼面安装还是地面安装,如果是楼面安装看总负载楼面能否承受。

成都本地机器人行走轴热销信息